











PCベースモーションライブラリはファインモーションの機能の一部を部品化したソフト関数群(ライブラリ)です。ライブラリをお客様ソフトに組み込むことで自由に独自のモーション制御を開発できます。世界でもっとも利用されている統合開発環境“Visual Studio”で開発が可能です。
サーボ制御の機能を「モーションライブラリ」に任せることで、お客様の独自性を発揮しつつ簡単に多軸モーションを実現できます。
モーションライブラリとファインモーションの違い
モーションライブラリは、ファインモーションの機能の一部をC言語関数としたものです。
お客様は、ソフトの部品(組み込み)として使うことで、面倒な軸制御機能を簡単に活用できます。
| モーションライブラリ | ファインモーションコントローラ | |
| 製品形態 |
ソフト単体(ライブラリ) INtime上で動作するソフト |
ボード・モジュール・ソフト単体 使用形態に応じて、いろいろなタイプ |
| 機能 |
単純な動作(単発) 位置決めや補間 |
手動運転 コマンド運転 自動運転(運転プログラム) 完成形のモーション機能 |
| マシンの管理・制御 |
関数を用いてお客様が自由に開発 ラダーや他のPCソフトとの連携が可能 |
ファインモーションがマシン制御 一連の動作を一括で制御 |
| 特徴 |
軸制御のための部品のようなソフト Visual Studio上で利用可能なAPIを組み合わせることで、C/C++にてモーションアプリケーションを開発可能 |
他のソフトが無くても、単独で自立して運転できる |
モーションライブラリ(MECHATROLINK/EtherCAT)
MECHATROLINK-III/EtherCATのサーボ・I/Oを簡単に使えるように機能毎の関数を準備しています。
WindowsやINtime環境で独自のモーションシステムや自動機制御が簡単に開発できます。
※EtherCAT版は、DC機能とCiA402ドライブプロファイル準拠のサーボアンプに対応しています。
また、マスタスタック(RSI-ECAT/DC or AI-ECAT)の購入が別途必要です。
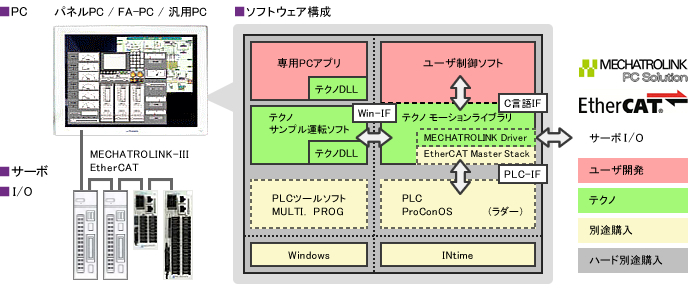
※PLCツールソフト、PLCは必須ではありません。
-
汎用PC
パネルPC / FA-PC / 汎用PCなどの選択が自由です。
-
INtime
Windowsに依存しないため、高信頼性を実現しています。
 INtimeについて詳しくはこちら。
INtimeについて詳しくはこちら。
※(株)マイクロネットのWebサイトをご覧ください。
-
MECHATROLINK/EtherCAT
高速ネットワーク(多軸サーボ・I/O)であるMECHATROLINK/EtherCATに対応しています。
3つのインターフェース
-
Win-IF
DLL(Dynamic Link Library)を介してWindowsアプリケーションからモーションライブラリの機能を利用できます。
-
C言語IF
INtime上のユーザ制御ソフトからも位置決め機能を利用できます。
-
PLC-IF
国際標準PLC「ProConOS」とも強力に連係します(IEC61131-3準拠)。
モーションサンプリング「TPCロギング」
多軸の軌跡・トルクなどの精度解析が可能です。制御周期に同期した軸の情報をEXCELで解析できます。
独自の動作・機構・サーボ系の動的精度の検証は、システム開発の効率を向上させます。
- サーボ応答解析の例

- 真円精度解析の例

-
事前検証
サーボを繋ぐことなくシミュレーション解析ができます。
-
実機運転
サーボを繋げることで実動作の解析ができます。
-
サーボ応答
サーボ系や機構の動的応答の計測できます。
-
軌跡精度
実軌跡(合成軌跡)と理想軌跡との差分を計測できます。
-
真円精度
極低速の不感帯 / ゲインバランスを確認できます。
導入ガイダンス
-
サンプルソフト
各関数の応用事例をC言語ソフト(ソースファイル)でご提供します。
-
トライアルキット
PC・サーボ・I/Oのデモユニットと運転トライアルのためのサンプルソフト集です。
半日程度の体験でご理解いただけます。
-
サンプル運転ソフト
Windows上の運転画面ソフトです。
C言語ソフトを自作しなくても、運転できます。
![]()
RTPL-M3/RTPL-EC
【仕様・動作環境】
| 型式 | RTPL-M3 (MECHATROLINK-III対応) |
RTPL-EC (EtherCAT対応) |
|---|---|---|
| CPU | Atom D510以上 | Core 2 duo以上 |
| メモリ | Windows必要量 + 128MB | Windows必要量 + 256MB |
| 軸指令 | MECHATROLINK-III 1Gpps 位置・速度・トルク制御 |
EtherCAT(CiA402ドライブプロファイル) 位置・速度・トルク制御 |
| 最大64軸(I/Oスレーブ局との合計) | ||
| 通信 | 共有メモリ | |
| データ保存 | HD/SSD等のストレージ | |
| 制御周期 | 0.125/0.25/0.5/1/2mse | |
| 開発言語 | C/C++ | |
| 開発環境 | Visual Studio | |
| INtimeバージョン | 6.2以降 | |
| その他 |
スレーブ局(サーボ、I/O)を合計62局接続可能 |
|
- ※RTPL-M3/RTPL-ECはソフトウェア商品です。
PCはユーザ様でご用意いただくため、寸法・電源・CPU・メモリ等は選定されたPCによります。

- お電話でのお問い合わせ【受付時間】平日9:00~17:00

- メールでのお問い合わせ24時間受付 / 電話受付時間外のお問い合わせはこちらから

