高速圧入・組立マシン制御のデモンストレーション
テクノのオープンMCでは、主軸3000rpmの高速圧入・組立マシンの実績があります。
2つの円板で模擬して、簡単なデモンストレーションをおこないます。
2 ヘッド上下とワーク送り軸の移動
■面倒な設定や調整は不要(サーボ系の最適調整のみ)
■低速~高速(3000rpm)全てで正確に同期
オーバライドで速度を自由に変更
■指令データは、簡単に表形式で定義
■ピッチ毎に送り量を微妙に修正可能
■テクノのPCソフトだけでも運転
(ラダーの負担は最小)
■PLCラダーから設定や変更も簡単
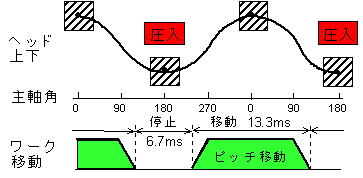
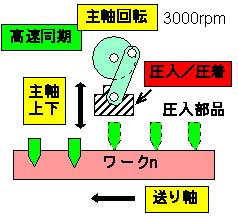
1 マシンと動作のイメージ
ヘッドの上下動作とワークの移動
の同期制御のようすです。
ヘッド上昇中に、ワークをピッチ分
正確に移動させます。3000rpm
では、1周期が20msecです。
■圧入区間
(ワーク停止区間)
約120度
■ヘッド上昇
区間
(ワーク移動区間)
約240度
ワーク軸模擬の円板
■部品間送りピッチ
30度
8mmボールネジで
0.67mm相当
■ワーク間送り
90度
8mmボールネジで
2mm相当
ワークに連続・高速で部品を圧入します。
圧入のピッチは、0.5~2mm程度で
ワークには、数十の部品を連続圧入します。
ワークも連続供給され、ワーク間のピッチは、
部品間ピッチより大きいのが通常です。
①主軸ヘッドがリンク・カム機構で上下。
②ヘッド上昇中にワークをピッチ移動し、
圧入位置で停止。
③ヘッドが下降して部品を圧入。
④必要数①~③を繰り返し次のワークへ移動
3 円板デモンストレーション
主軸とワーク軸の機構を簡単な円板にたとえて同期性の
デモンストレーションをします。
主軸(ヘッド上下)模擬の円板
4 デモンストレーションのポイント
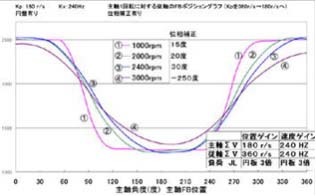
5 位相制御
実機では、機構の慣性や剛性の条件で、主軸とワーク軸機構でサーボ系の
応答性が異なります。
位相制御により応答性を補償して、低速~高速まで常に正確に同期できます。
オープンMCの内在機能ですので、お客様は機構に応じた最適なパラメタを
設定するだけです。
オープンMCには、同期精度をμm単位で検証する
ための計測と解析手段を内蔵しています。
位相制御の最適調整も簡単です。
図は、主軸回転角(横軸:度)と従軸(縦軸位置)
の同期性を検証した事例です。
位相制御の効果で、1000~3000rpmの全領域
で完全に同期しています。
7 もう少し詳しく知りたい方に